
栏目主持人

董绍华教授(中国石油大学(北京)教授,博士生导师,管道技术与安全研究中心主任):本期介绍一种适用于站场工艺管道在线自动化扫描探伤机器人(简称扫描探伤仪)产品。该产品源于俄罗斯相控阵阵列扫描技术,可用于压缩机/泵站(CS)等站场工艺管道(IP)无损在线检测(ILI)全过程。其针对压缩机/泵站与工艺管道(IP)的三维拓扑结构、精确走向位置、管道内外部几何变形等,自动选择缺陷类型与合适检测参数,克服了管道内部腐蚀性杂质或其他风险因素,实现对管道基体金属缺陷和焊接缺陷的检测,也可实现内涂层剥离区域的快速检测。
站场工艺管道在线自动化扫描探伤机器人技术
高策1 谢建宇2 编译
1.中国石油大学(北京)管道技术与安全研究中心;
2.中亚管道哈萨克斯坦公司
1 技术特性
1.1 扫描探伤仪进入管道内部
带传感器的扫描探伤仪重量为18 kg,其总尺寸为310×230×210 mm(在检测模式下)。其通过检修孔进入管道内部,导线从320×240 mm的接入孔接入(图 1、图 2)。

图?1扫描探伤仪通过检修孔进入管道

图?2扫描探伤仪进入管道
1.2 扫描探伤步骤
无需特殊清理,控制模块(图 3)控制扫描探伤仪沿着管道路径移动(图 4),使用视频光学系统(视觉和尺寸检查)和具有干耦合点接触的声换能器的相控阵阵列(超声导波、剪切水平波、 SH波),检测管道元件的金属母材和焊接接头,生成初始诊断数据,并将数据传输到操作员控制面板。

图?3控制模块

图?4扫描探伤仪沿管道路径移动
1.3 扫描探伤仪工作模式
扫描探伤仪的内置式锂―铁聚合物蓄电池(200 W/h容量)可提供长达8 h的自给式操作电力(最高行驶速度空载模式下5 m/min,检测模式下0.3~0.7 m/min)。操作员(距离插入扫描探伤仪的位置最远为 1 500 m)通过Wi-Fi网络实时控制扫描探伤仪移动,并实时获取诊断信息,如图 5所示。

图?5操作员实时获取诊断信息
2 关键模块
2.1 传感器
相控阵超声波检测单元基于具有干耦合点接触(DPC)的超声波换能器,允许通过换能器的陶瓷保护器和金属表面之间的摩擦仅在管道壁中发送和接收超声波而不需要耦合剂。一组32个DPC传感器形成一个在所需方向上相控阵阵列(AA),并在管壁上形成引导的超声波,频率范围为20 ~80 kHz(寻找高度超过管壁厚度10%的缺陷,有效检测长度可达4 000 mm),如图 6所示。
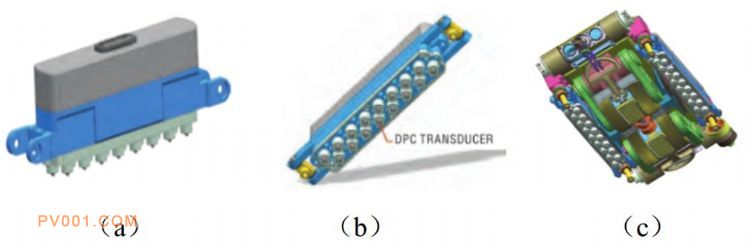
图?6传感器
2.2 视频光学系统
扫描探伤仪的视频光学系统提供在线视觉检测,提供5 m/min视频外观检查数据。视频光学系统包括一个500万像素矩阵的高清摄像头和一个180°拾取角度的摄像镜头,两个LED射灯和垂直平面模块,可同时在扫描探伤时驱动和启动,如图 7所示。其同时带有两个位于正面和背面的类似的视频光学系统单元,在小直径管道(小于DN 500 mm)内,扫描探伤仪无法转动,则需要第二台摄像机相对扫描探伤仪反向移动。该模块还包括甲烷浓度测量传感器和投射激光器。

图7视频光学系统
2.3 磁电机驱动
扫描探伤仪通过磁电机轮驱动模块沿任意路径移动,磁模块基于稀土永磁体,具有高残留感应磁场,铁磁表面产生61.22 kg (600 N)的拉力,传感器内置于模块中,用于感应“轮面”轮廓的磁场强度,允许从铁磁表面记录车轮分离扭矩,如图 8所示。
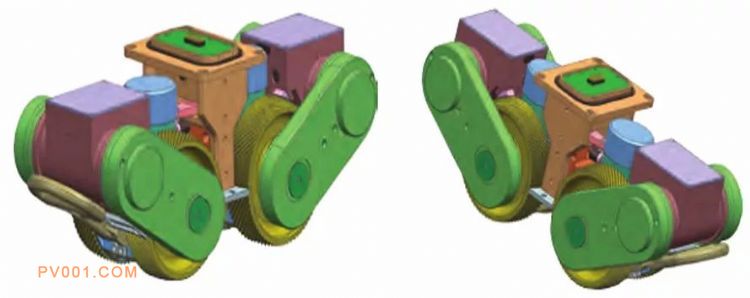
图?8磁电机轮驱动
三轴微电机系统内置于电机轮驱动模块,从而实现路径定位功能(三维拓扑结构定位),并控制扫描探伤仪在自动模式下移动,运动模式如图 9所示。

图?9扫描探伤仪螺旋检测
动力驱动平台允许扫描探伤仪沿着各种元件(管道,弯头, T形接头,减径管,关闭和控制阀)移动,适合于DN 400~1 420 mm管道。驱动平台采用二轴方案,允许三通T型接头进入,可避障,沿任意路径移动。
3 检测图像
操作员实时检测如下工况,获取管道扫描探伤图像,如图 10(1)~(5)所示。
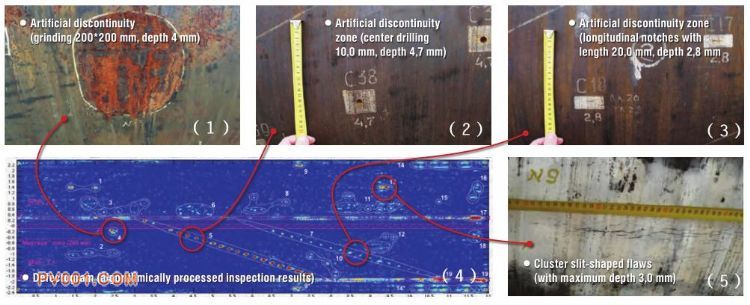
图?10各类缺陷经算法处理后的检测图像
(1)人工连续缺陷(磨削200×200 mm,深度4.0 mm)。
(2)人工不连续区域(中心钻孔10.0 mm,深度4.7 mm)。
(3)人工不连续区域(纵向槽口,长度为20.0 mm,深度为2.8 mm)。
(4)缺陷图(经过算法处理的检验结果)。
(5)簇状狭缝形缺陷(最大深度为3.0 mm)。
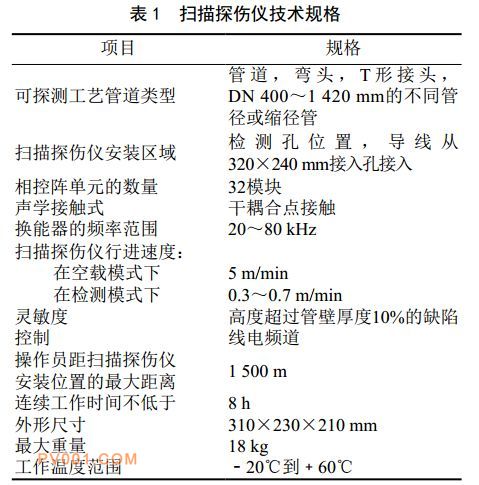
4 技术规格
扫描探伤仪技术规格如表 1所示。
5 结论
(1)扫描探伤仪针对站场管道的检修作业,使用视频和相控阵探伤方式,能够检测管道内部运行情况。
(2)针对站场工艺管道内部复杂情况,扫描探伤仪可实现管体和焊缝的自由扫查,不受三通、管径、工艺支管的影响,达到全覆盖扫描的目的。
(3)扫描探伤仪如何进入管道内部成为阻碍管道检测的难题,主要是由于站场工艺管道需要进行站场介质置换。因此,研究外部控制技术、改为从站场收发球筒盲板进入为最佳模式,这需要从屏蔽控制等方面进行突破。
董绍华: 1972年生,中国石油大学(北京)教授,博士生导师,管道完整性与安全技术专家,第五届国家安全生产专家组成员,国家质检总局特种设备压力管道技术委员会委员、 NACE 国际完整性技术专家委员会主席、北京石油学会理事兼石油应用与储运专业委员会主任,现任中国石油大学(北京)管道技术与安全研究中心主任,担任2017年国家重点研发计划“公共安全专项”国家储备库安全保障项目负责人,主要研究方向为管道完整性技术、安全工程技术、大数据与人工智能技术等。获省部级奖励25项,一等奖6项,出版中英文学术著作9部,授权国家专利25件,编制国际、国家、行业、企业技术标准40余部,发表学术论文100余篇, SCI/EI 收录40余篇。

(来源:未知)
