随着核电安全要求的不断提高,对于自动控制的要求也随之增强。电动驱动机构在三代核电中阀门上的应用也更加广泛,尤其在核岛范围内的阀门上,更是大面积取代驱动机构。为实现自动控制,通过电动驱动机构中电机转动的圈数来反馈阀门的位置成为一种技术选择,此装置一般称为电位计。某电站在进行冷态工程试验时发现部分对调节精度要求较高的调节阀在手动或自动模式动作过程中,出现阀位反馈跳变的现象,当阀门处于自动控制模式时,此现象造成阀门操作不精确。
2闭环控制中阀位信息的重要性
闭环控制系统亦称反馈控制系统,这是一种最基本的控制系统。在闭环控制系统中,被控信号以反馈方式送入调节器的输入端,作为不断引起控制作用的依据,而控制的目的是尽可能地减少被控量与其设定值之问的偏差。
阀位测量在工业过程控制中起着非常大的作用,准确、及时的测量阀门阀位,直接决定调节系统调节的准确性、快速性、稳定性等指标。测量信号的可靠性和准确性是决定自动控制系统品质的基础。
此电站中有近百台电动调节阀需要参与闭环控制。在阀门调试过程中,发现部分阀门实际开度和阀位测量开度不对应,阀门向关闭方向偏差呈偏大趋势;实际操作阀门时,发现当阀门从开向关,或者从关向开的过程中,存在一定比例的阀门行程操作但阀位显示无变化,即阀位测量回程存在死区的现象厂。
3原因分析
此电站调节阀的阀位是通过电动头中的电位计反馈。电动头的转动通过联轴器连接阀杆,将电动头螺杆螺母的转动转换为阀杆的直线运动,电动头的转动同时改变电位计中电阻丝电阻值(类似滑动变阻器),最终电位计输出4-20mA电流,建立电流和阀位的线性关系。
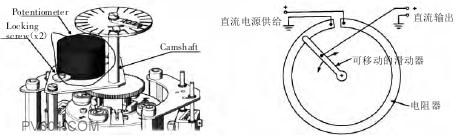
图一 电位计原理图

图二 电位计实体图
根据事件描述和电位计的工作原理,对直接原因、问接原因和根本原因分析如卜:
3.1直接原因
厂家的电动调节阀未设计单独的位置指示器,使用电动头自带的电位计反馈阀位信号。电动头电位计是通过电动头的转动信号计算阀门行程,此信号经过多级齿轮传动存在偏差。
3.2间接原因
部分核岛电动调节阀参与闭环控制,闭环控制对于阀位信号精度要求相对于一般阀门更高,导致电动头反馈的阀位信息无法满足要求。
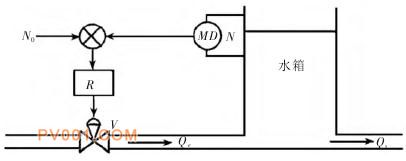
图三 闭环控制原理图示
闭环调节系统的原理如图三所示。被调量水位N由变送器MD测出,与设定值NO比较,偏差信号送往调节器R,改变执行机构V阀开度以增、减给水流量,维持水箱水位为设定值。闭环调节系统就是按被调量进行调节的系统,调节精度高。
在电动调节阀处于自动模式时,过程控制设定量与感应器测得系统的实际量进行对比,通过PID(比例积分微分控制系统)计算出阀门需要调节的阀位值,包括开或关的量以及开关的速率。阀门的位置指示器反馈阀位,设定值(被调量和阀位信息不断被反馈给控制系统,进行调节。
在电动调节阀正、反向控制过程中,因死区原因,阀门在死区的行程内,阀门开度指令信号和阀位测量信号无变化,无法实现精确调节。
实际调节过程中,当被调量与设定值偏差较小,需要反方向小范围调节阀门,经过一个调节过程后,因死区的存在,必然使阀门实际动作行程大于死区范围,从而使被调量偏差反方向进一步加大,又进入卜一个较大幅度的调节过程,最终阀门频繁动作,被调量在较大范围内波动而无法稳定,这种现象尤其在低开度时更为明显。一般情况卜,自动调节系统执行机构及其反馈通道的死区较小时,可通过设置PID的调节死区来解决被调量波动和执行机构频繁动作的问题,但因工艺系统自身要求,被调量与设定值问偏差不能过大(过大后调节滞后,调节幅度较大,不利于调节系统稳定),要求这一死区不得大于2%。
3.3根本原因
阀门电机转数经多级变速、减速齿轮后,通过安装在末级齿轮输出轴上的电位器,将转数信号轮换为对应的电阻值,再通过DCS将电阻值转换为相应的阀门开度,从而实现阀门阀位的测量。当阀门同方向开启或关闭时,主动轮和从动轮问紧紧啮合,没有问隙,此时不会形成同方向开关死区,而当反方向关闭或开启阀门时,由于齿轮问存在咬合问隙,且经多级齿轮问问隙叠加,导致安装在末级齿轮输出轴上的电位器不能和阀门同步旋转,从而产生了死区。
4采取措施
4.1类似阀门的处理措施
通过外置传感器提供阀位信息,在阀杆上增加位置指示器,直接测量阀位信息后反馈给控制系统。目前此方式已在此电站的其他阀门上应用,经调试可以准确反馈调节阀阀位。
4.2后续处理
对于后续采购带有闭环控制要求的电动调节阀,需要明确回调死区的技术要求,并建议加装位置指示器。
4.3安全性和经济性
根据实际操作,参与闭环控制的调节阀根据功能不同,对阀位信息精度要求存在差异。对于调节精度要求相对较低的阀门,使用现有电动头自带的电位计即可满足要求,无需额外采购位置指示器;对于需要精确调节的阀门,可优先实施联轴器的优化改造,根据优化后的结果再确认是否需要加装位置指示器;对于需要加装位置指示器的阀门,根据等级要求选择合适的指示器。

- ・直行程电动调节阀在宁钢的改造和应用2019-05-20
- ・阀笼式调节阀套筒窗口形状设计与流量特性分析2019-05-20
- ・采气管线压力调节阀的冲蚀特性研究2019-05-20
- ・控制阀的故障保位2019-05-17
- ・IZ9D型单座调节阀空化特性数值模拟研究2019-05-17
- ・汽轮机调节阀LVD丁设计优化方案2019-05-16
- ・硫酸干吸系统自动调节阀选型2019-05-16
- ・目前工业对调节阀的要求2019-05-16
- ・供热系统中电动调节阀门的应用研究2019-05-15
- ・动态压差平衡型电动调节阀应用案例研究2019-05-15








